
Moteurs électriques à vitesse de rotation
Moteurs électriques: vitesse de rotation théorique déterminée par le nombre de pôles
Moteurs électriques à vitesse de rotation
Bienvenue dans ce guide créé par Itieffe, dédié aux moteurs électriques et à leur vitesse de rotation théorique déterminée par le nombre de pôles. Cet aspect fondamental des moteurs électriques influence directement leurs performances et leur application pratique dans un large éventail de secteurs industriels et technologiques.
L'importance de la vitesse dans les moteurs électriques
La vitesse de rotation est l’une des caractéristiques clés des moteurs électriques et a un impact significatif sur leurs performances.
Comprendre comment cette vitesse est affectée par le nombre de pôles du moteur est essentiel pour les ingénieurs, techniciens et professionnels dans des domaines tels que l'automatisation industrielle, le génie mécanique et l'électronique.
Objectifs du guide
Ce guide a été créé dans le but de fournir un aperçu complet des aspects suivants :
- Nombre de pôles et vitesse de rotation : nous explorerons la relation entre le nombre de pôles d'un moteur et son vevitesse de rotation théorique. Nous expliquerons comment calculer cette vitesse et comment ces connaissances peuvent être appliquées dans la pratique.
- Applications pratiques : nous illustrerons à quel point la compréhension de ce concept est cruciale dans un certain nombre d'industries, notamment l'ingénierie mécanique, la fabrication, etc.
- Considérations de conception : nous discuterons de l'impact de ce concept sur la conception et la sélection de moteurs électriques pour répondre aux besoins d'applications spécifiques.
- Vitesse de rotation théorique : nous approfondirons le concept de vitesse de rotation théorique des moteurs électriques et expliquerons comment elle est influencée par le nombre de pôles du moteur.
Vitesse des moteurs électriques - Pôles
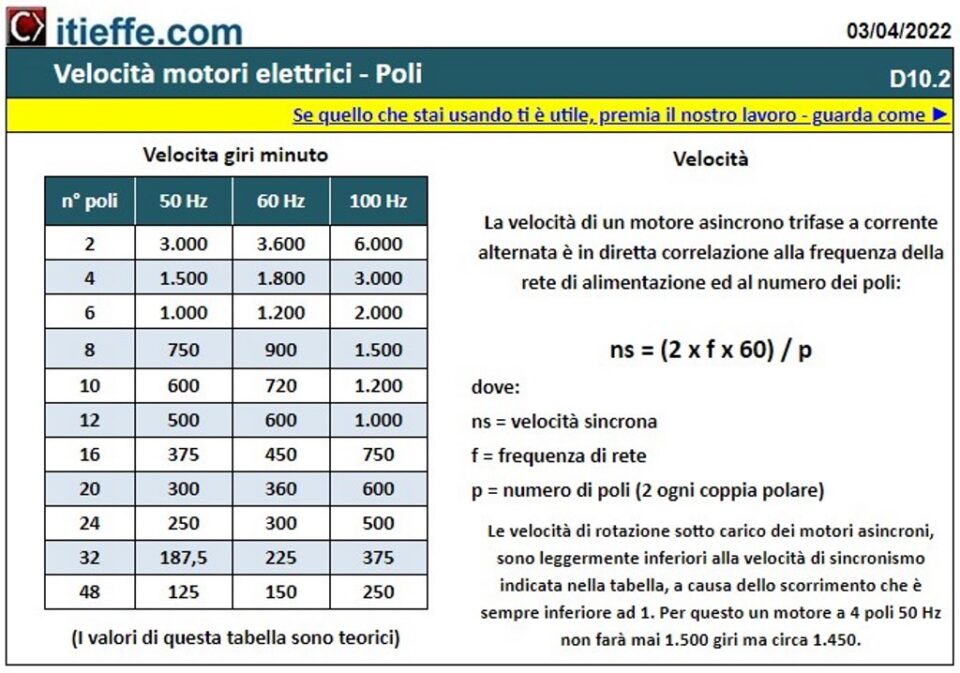
La vitesse d'un moteur asynchrone triphasé à courant alternatif est directement liée à la fréquence du réseau d'alimentation et au nombre de pôles :
ns = (2 xfx 60) / p
où:
ns = vitesse synchrone
f = fréquence du réseau
p = nombre de pôles (2 chaque paire polaire)
Les vitesses de rotation sous charge des moteurs asynchrones sont légèrement inférieures à la vitesse de synchronisme indiquée dans le tableau, du fait du glissement qui est toujours inférieur à 1.
Pour cette raison un moteur 4 pôles 50 Hz ne fera jamais 1.500 tours mais environ 1.450.
Tours de vitesse par minute
n ° pôles |
50 Hz |
60 Hz |
100 Hz |
| 2 | 3.000 | 3.600 | 6.000 |
| 4 | 1.500 | 1.800 | 3.000 |
| 6 | 1.000 | 1.200 | 2.000 |
| 8 | 750 | 900 | 1.500 |
| 10 | 600 | 720 | 1.200 |
| 12 | 500 | 600 | 1.000 |
| 16 | 375 | 450 | 750 |
| 20 | 300 | 360 | 600 |
| 24 | 250 | 300 | 500 |
| 32 | 187,5 | 225 | 375 |
| 48 | 125 | 150 | 250 |
(Les valeurs de ce tableau sont théoriques)
Autres programmes gratuits du même genre proposés par itieffe ▼
- Électricité - Électronique
- Calcul des radiateurs électriques à code couleur
- Tables électriques - électroniques
- Schémas de dessin électrique
Moteurs électriques à vitesse de rotation
Le programme / article présenté ci-dessous est libre d'utilisation.
Pour accéder à la version réservée (voir ci-dessous), pleine page et sans publicité, vous devez être inscrit.
Vous pouvez vous inscrire dès maintenant en cliquant ICI